Multi-stage prediction networks for data harmonization
Highlights
- Deep learning for dMRI harmonization, leveraging limited datasets using multi-task learning (multiple independent networks are merged to accomplish a final task).
Method
-
Task: Predict multiple high quality targets (modern platforms) from a single low-quality input (out-of-date platform)
- Standard methods
- Registration to a common template
- Align mean and variance from each platform (voxelwise/regionally/whole image)
- Deep learning methods
- CNN-RISH (Rotation-Invariant Spherical Harmonics)
- DIQT (Deeper Image Quality Transfer)
- SHResNet
All existing deep learning methods use a single CNN to accomplish a single task (mapping the source to a single target platform). Traveling heads datasets (one subject scanned on multiple scanners) are very limited, which is problematic for deep learning.
Solution
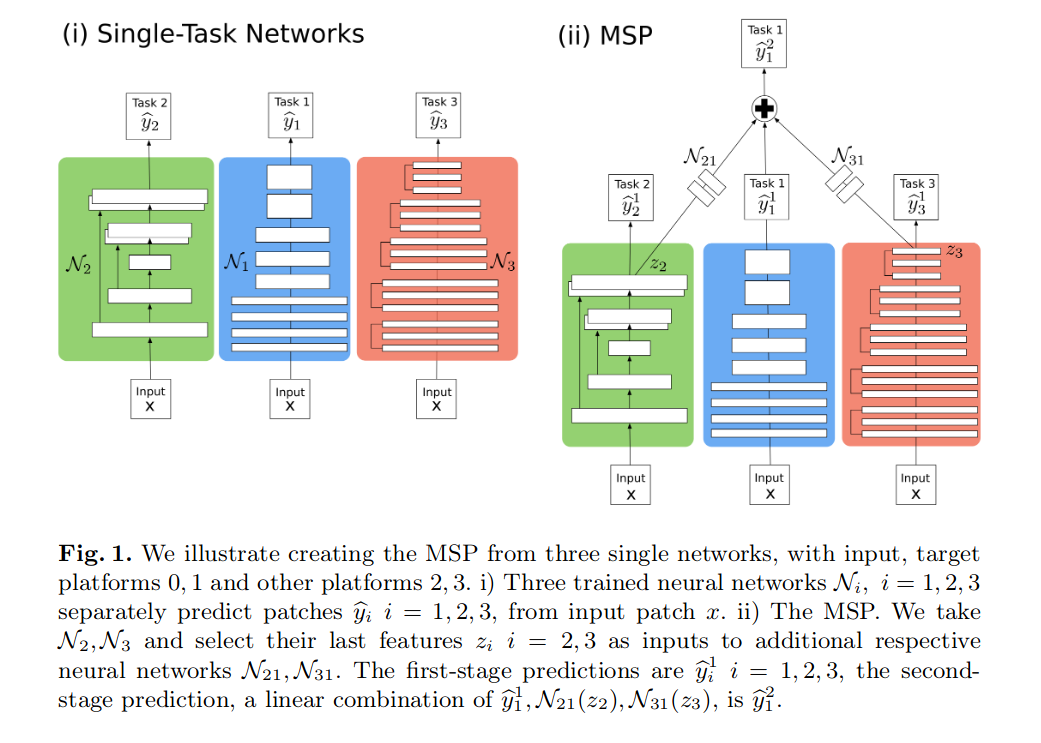
- Use multi-task learning to train multiple networks on independent tasks, then use the last layers as input to a new network adated for the specific task.
- The final prediction is a linear combination of the task-specific predictions.
Model figure
Experiments
Data
- MUSHAC dataset
- 10 healthy subjects scanned on 3 different scanners
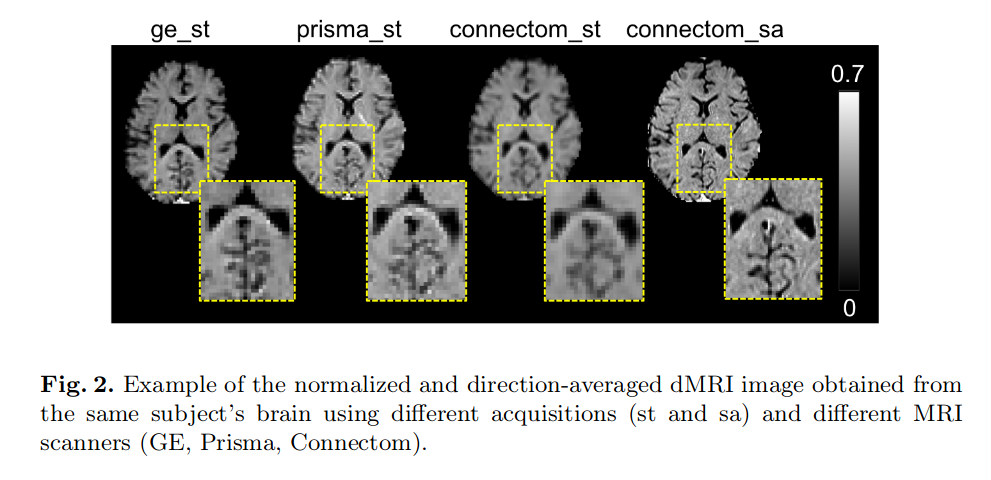
- GE 3T (“out-of-date” platform), Siemens Prisma 3T, Siemens Connectom 3T
- Standard (st) protocol: 2.4mm, 30 directions; SotA (sa) protocol: 1.2mm, 60 directions
- Model input: SH coefficients after deconvolution, 6th order (28 coefficients), processed as patches of 11^3 voxels
- Target: Patches of 11^3 (harmonization) or 11^9 (harmonization + super-resolution)
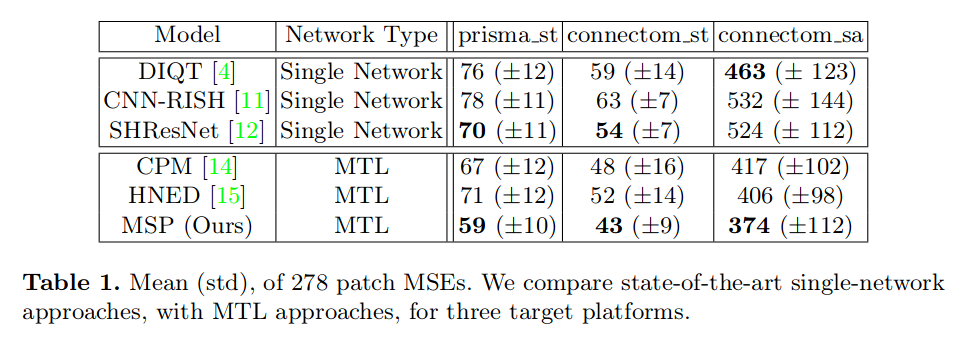
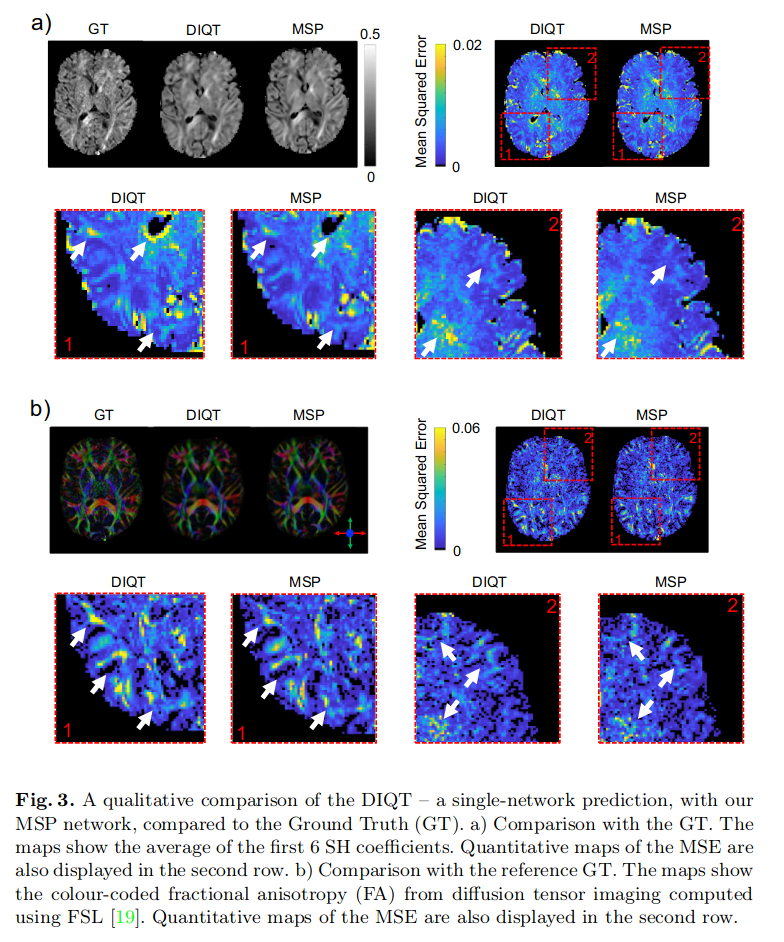
Results
Comments
- MSP reuses many pretrained models, and adds many new sub-networks, so it has much more parameters than any single model, which might give it an advantage over others.
- The final MSP layer is still task-specific.
- No subjects were specifically left out for the test set.
- They seem to choose the task-specific models based on the test set evaluation, which may indicate data contamination.