Learning a Discriminative Feature Network for Semantic Segmentation
Description
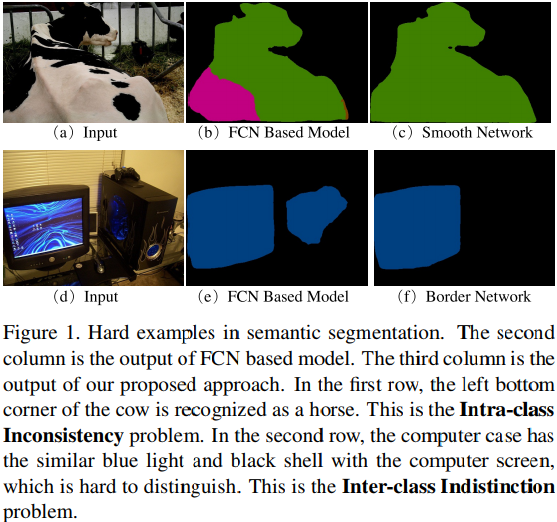
Semantic segmentation methods often suffer from two problems: intra-class inconsistency and inter-class indistinction (c.f.Fig.1). To tackle these two problems, they propose a Discriminative Feature Network (DFN), which contains two sub-nets: a Smooth Network and a Border Network (c.f.Fig.2)
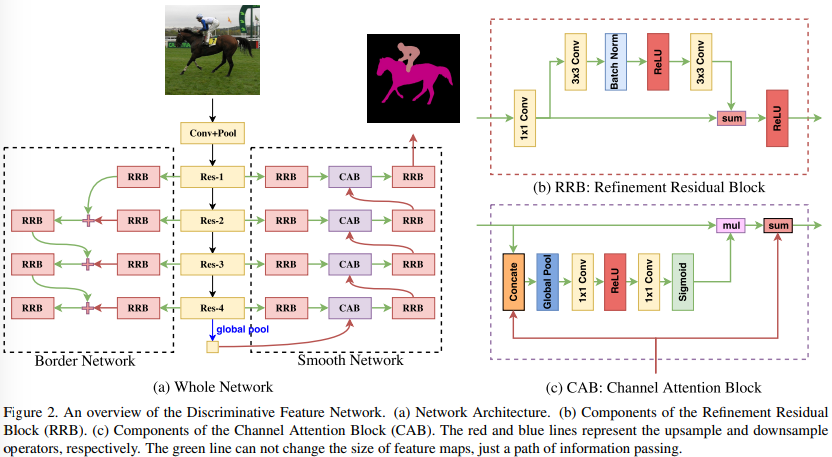
Smooth Network
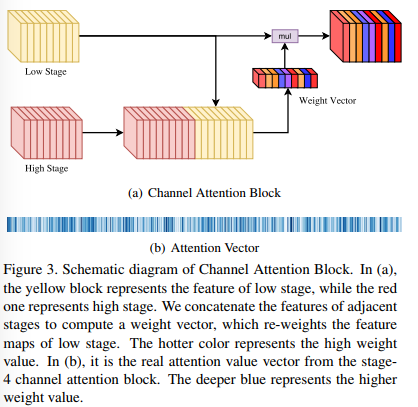
The smooth network is designed to address the intra-class inconsistency issue. It is like a U-Net by with Channel Attention Blocks (CAB) (c.f. Fig.3), which utilizes the high-level features to guide the selection of low-level features stage-by-stage. They also use a Refinement Residual Block (RRB) which is a fancy residual block. This network is trained with a usual cross-entropy.
Border Network
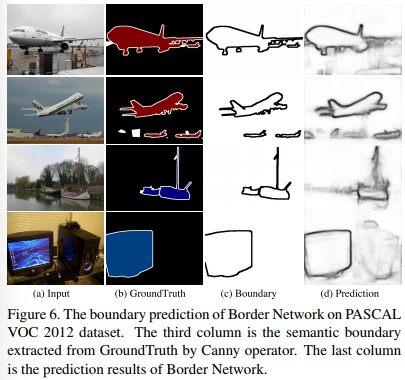
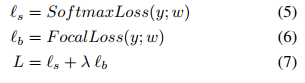
The Border Network, on the other hand, tries to differentiate the adjacent patches with similar appearances but different semantic labels. It does so by by predicting objects boudaries. To account for the strong class imbalance (there is much less border pixels than non-border pixels) this network is trained with a focal loss. The resulting loss is:
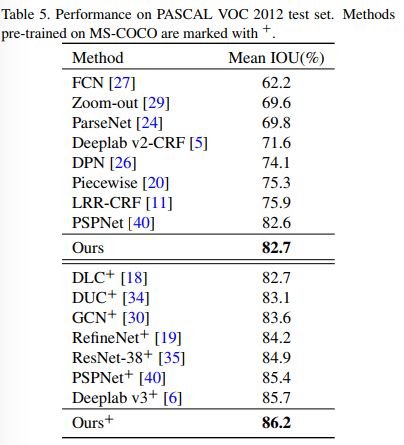
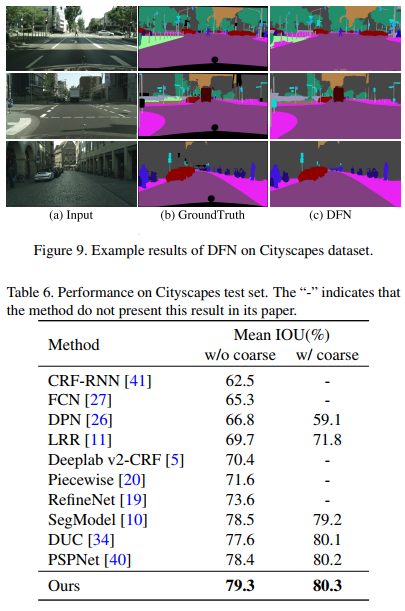
Results
This method is state-of-the-art on Pascal VOC and Cityscapes