Burst Denoising with Kernel Prediction Networks
Goal
The presented approach aims at learning a set of filters for denoising bursts of images taken by hand-held cameras (e.g. in smartphones).
Contributions
- Synthetic data creation from general purpose images simulating characteristics of real cameras.
- Pixel-wise 3D kernel prediction for denoising of burst image sequence.
- Adaptive, weighted (‘annealing’) loss.
- Generalisation to multiple noise levels.
Conceptual overview
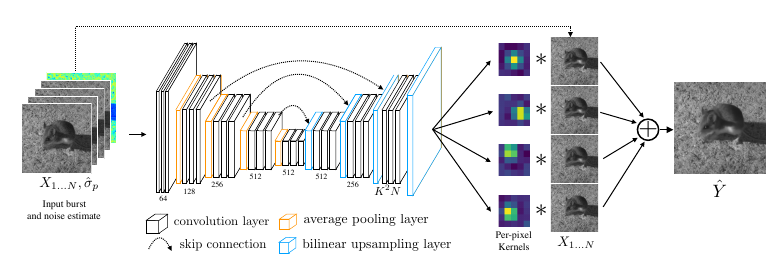
Basic concept
-
input
- set of series of N images (burst)
- one image of pixel-wise noise estimates
-
encoder-decoder structure
-
output
- N filters per pixel in input space (filter size: \(K\) by \(K\))
-
synthesis of output image at pixel \(p\) by
\[\hat{Y}^p = \frac{1}{N} \sum_{i=1}^N \, <f_i^p, V^p(X_i)>,\]where \(f^p_i\) denotes the learned filter at pixel \(p\) in input image \(i\).
Loss
-
main objective
- \(L^2\)-term on gamma-corrected images
-
\(L^1\)-term on gradients of gamma-corrected images
\[\ell(\hat{Y}, Y^\ast) = \lambda_2 \, \left\lVert\Gamma(\hat{Y}) - \Gamma(Y^\ast)\right\rVert_2^2 + \lambda_1 \, \left\lVert\nabla\Gamma(\hat{Y}) - \nabla\Gamma(Y^\ast)\right\rVert_1^2\]
-
annealed loss (This is the actual loss term!)
- time dependent individual image loss term
-
idea: steer training in the beginning to avoid convergence to local minima
\[\mathcal{L}(X; Y^\ast, t) = \ell\left(\frac{1}{N}\sum_{i=1}^N \, f_i(X_i), Y^\ast\right) + \beta\alpha^t \sum_{i=1}^N \, \ell(f_i(X_i), Y^\ast)\]
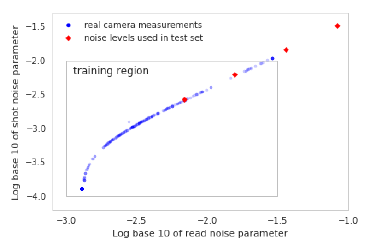
Synthetic data creation
-
The authors develop an approach to model several artifacts involved in creation of raw data from real camera sensors, including e.g.
-
explicit model for signal noise
-
simulated misalignment due to sensor movement
-
Experiments
Settings
- filter size: K = 5
- number of input images: N = 8
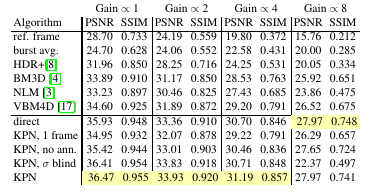
Nomenclature (KPN methods)
- 1-frame: N = 1
- no ann: basic loss function only (@see main objective)
- sigma blind: no noise estimate as input
- direct: directly synthesise output pixel values (by adding three additional conv layers)
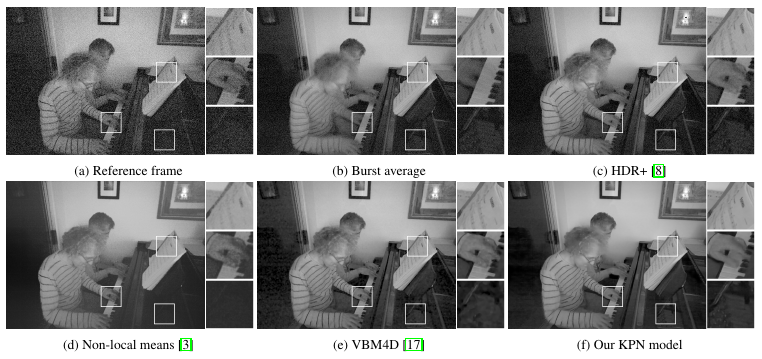
Synthetic data set
- KPN always outperforms state of the art
-
multi-frame info, annealing loss and noise estimate are all helpful
Real data set
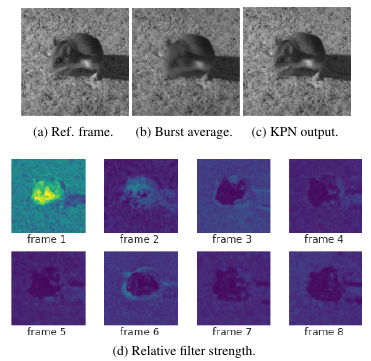
Predicted kernels
- The approach is robust to object movement (the mouse).
-
The authors claim that their ‘annealing’ approach helps focusing on a single frame where movement occurs, while taking advantage of all frames in static parts of the image (i.e. background).
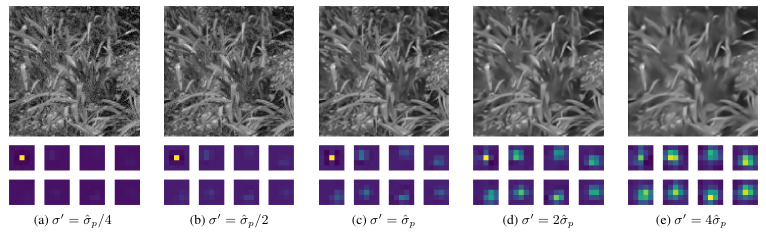
Adaptation to noise levels
-
Noise estimation
- did not improve training loss
- but helps for generalisation to larger (unseen) noise levels
-
Learned filters adapt to the noise estimate in the input
- (a) to (e): scalar multiples of noise estimate for same image burst