Segment-before-Detect: Vehicle Detection and Classification through Semantic Segmentation of Aerial Images
Description
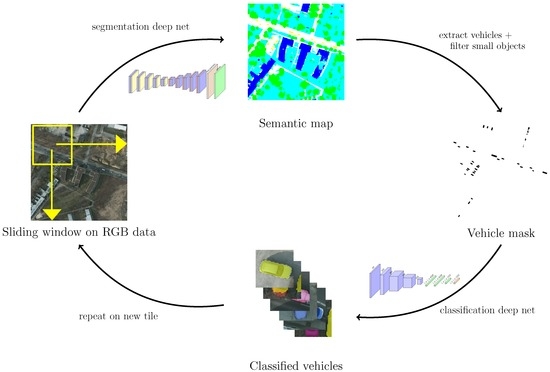
They proposed a three-step segment-before-detect method for vehicle extraction and classification in very high-resolution remote-sensing.
- Segmentation.
- Vehicle detection (regression on the bounding boxes of connected components).
- Object-level classification.
Models
Segmentation: SegNet (pre-train on VGG16 on ImageNet base on conclusion of 1).
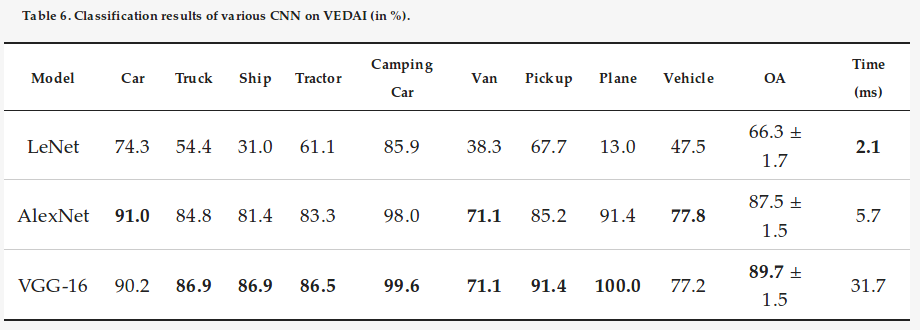
Classification: LeNet-5, AlexNet and VGG16.
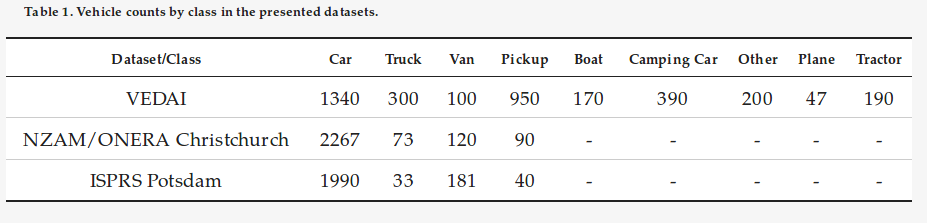
Datasets
- VEDAI (Box/vehicle class) 2
- ISPRS Potsdam (Segmentation) 3
- NZAM/ONERA Christchurch (Box/detection) 4

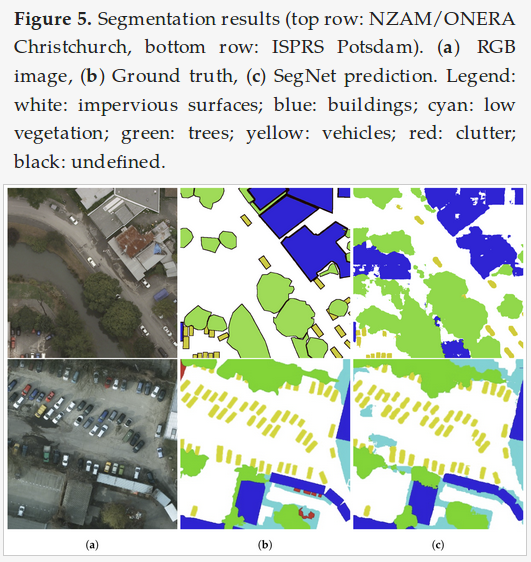
Experiments/Results
Segmentaiton: Potsdam(cars) = 95.1% and Christchurch(Vehicle) = 61.9%
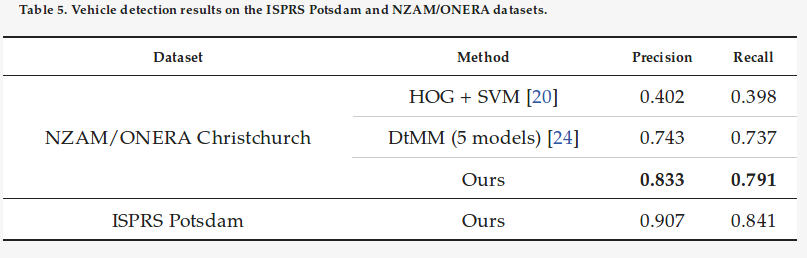
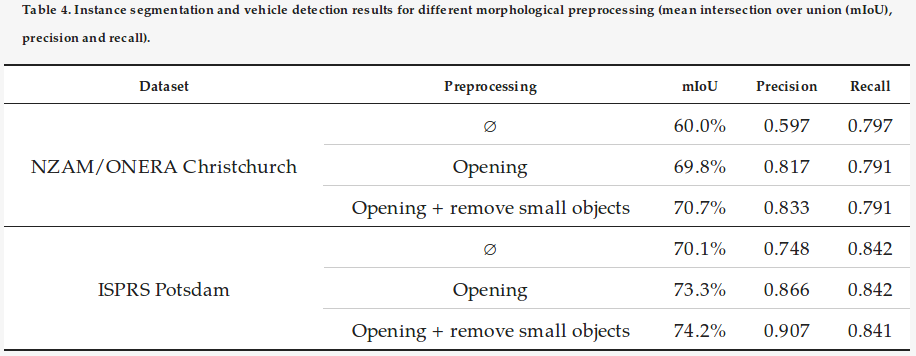
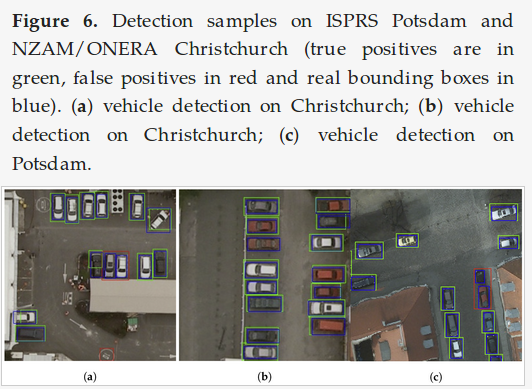
Detection:
Classification:
Transfer Learning for Vehicle Classification:
![]()
![]()
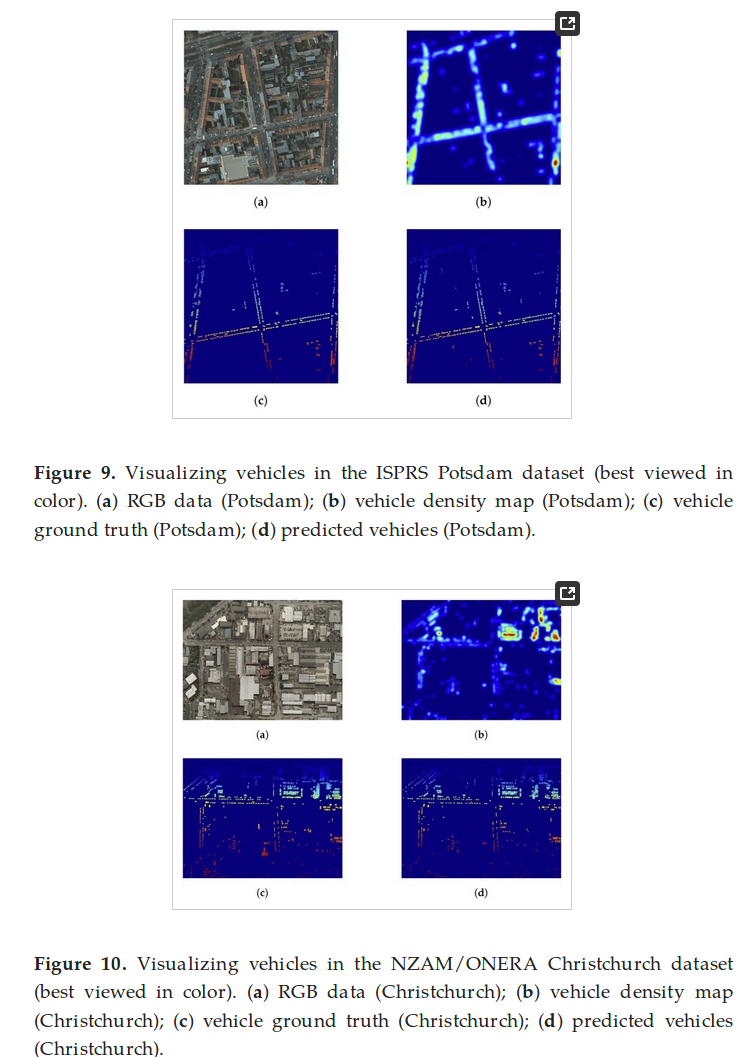
Traffic Density Estimation:

-
Audebert, N.; Le Saux, B.; Lefèvre, S. Semantic Segmentation of Earth Observation Data Using Multimodal and Multi-scale Deep Networks. In Proceedings of the Computer Vision—ACCV, Taipei, Taiwan, 20–24 November 2016; Springer: Cham, Switzerland, 2016; pp. 180–196. ↩
-
Razakarivony, S.; Jurie, F. Vehicle Detection in Aerial Imagery: A small target detection benchmark. J. Vis. Commun. Image Represent. 2016, 34, 187–203. ↩
-
Rottensteiner, F.; Sohn, G.; Jung, J.; Gerke, M.; Baillard, C.; Benitez, S.; Breitkopf, U. The ISPRS benchmark on urban object classification and 3D building reconstruction. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 293–298. ↩
-
Randrianarivo, H.; Saux, B.L.; Ferecatu, M. Urban Structure Detection with Deformable Part-Based Models. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 200–203. ↩