Neural Architecture Search with Reinforcement Learning
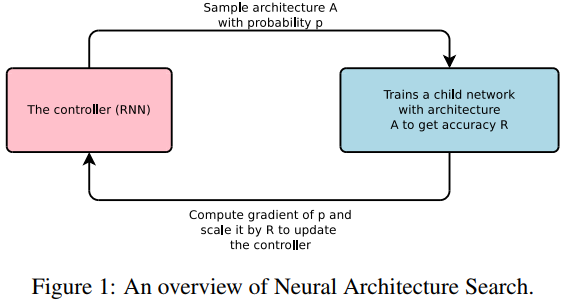
The goal of this paper is to search for neural architectures. Since the architecture of a network can be seen as a sequence of elements, they predict a network A with an RNN controler (or policy network). Once A is generated, it is trained and its validation accuracy is used as reward to train the controler afterwards. More specifically, the controler is executed \(m\) times, thus generating \(m\) architectures \(A_i\) to \(A_m\). Then those \(m\) networks are then trained and validated which results into \(m\) validation accuracies (or rewards). The system then uses policy gradient to update the controler.
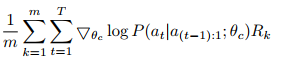
The actual policy gradient equation is as follows where \(T\) is the number of hyperparameters the controller had to predict to design a neural network architecture and \(a_t\) is the t-th element in the architecture
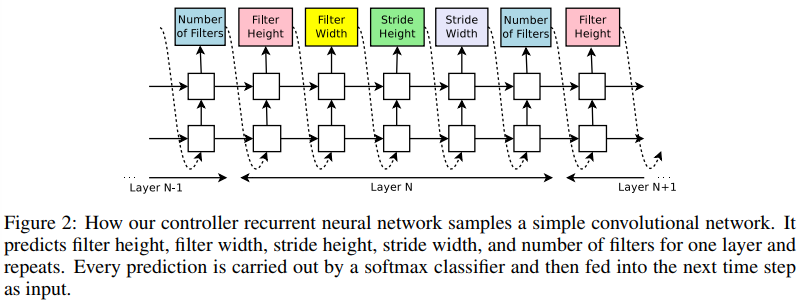
Here is an exemple of a recurrent controler generating the structure of a simple CNN (the input is random noise)
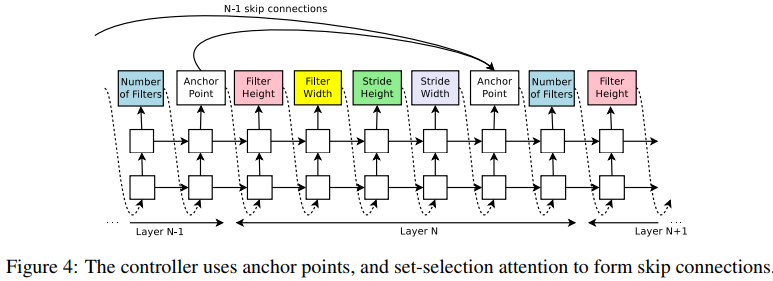
The controler can also predict anchor points to get skip connections.
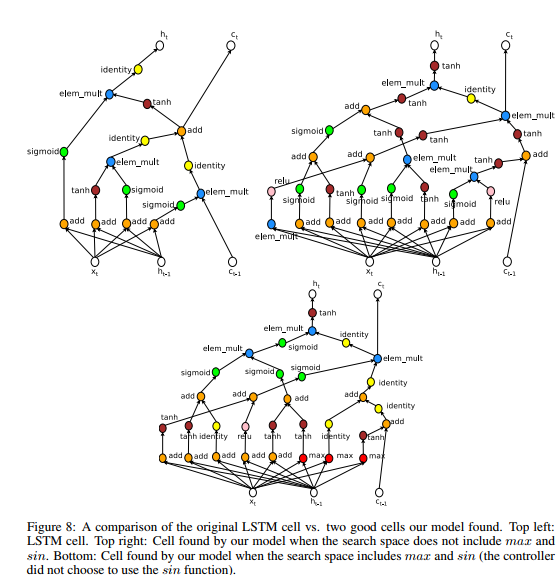
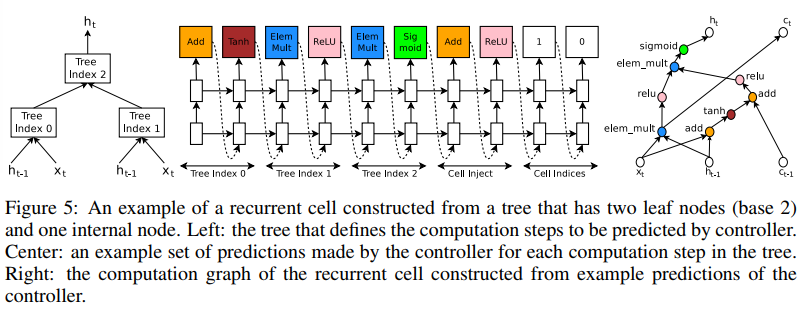
They also proposed an RNN for predicting recurrent networks
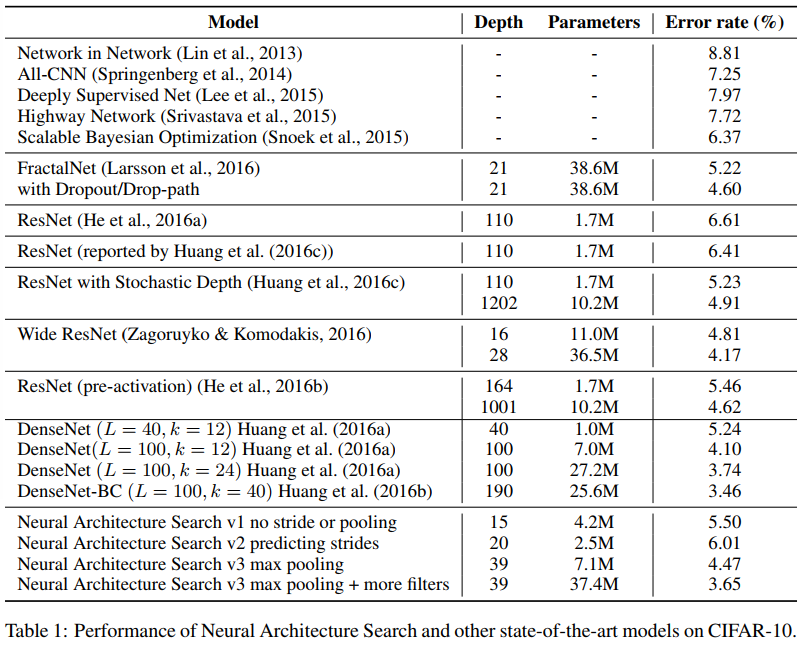
Results
The get state-of-the-art results on CIFAR-10 and outperform LSTM on Penn TreeBank