Designing Deep Convolutional Neural Networks for Continuous Object Orientation Estimation
In this work, the authors demonstrate how CNNs can be used to estimate the orientation of an object between 0o and 360o. For this, they propose and test 3 different methods. For each method, they assume that each image comes with a single prominent object located at the center of the image. Each method is tested with a ResNet-201 pretrained on ImageNet.
Method 1
Orientation is defined by a vector \(\vec v=(cos(\theta),sin(\theta))\) and the loss is a L1 norm. During testing, the predicted vector \(\vec v=(x,y)\) is converted to an angle with a atan2 function.
Method 2
Same as Method 1 but with a cosine loss \(L(\vec v_{gt},\vec v)=1-cos(\theta)\) where theta is the angle between the predicted vector and the groundtruth vector.
Method 3
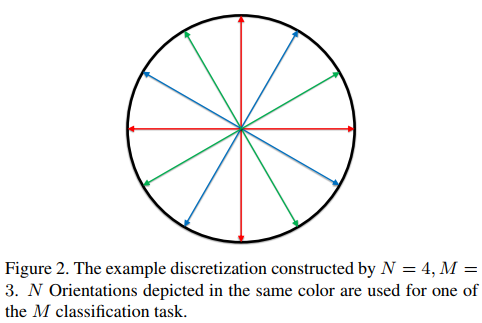
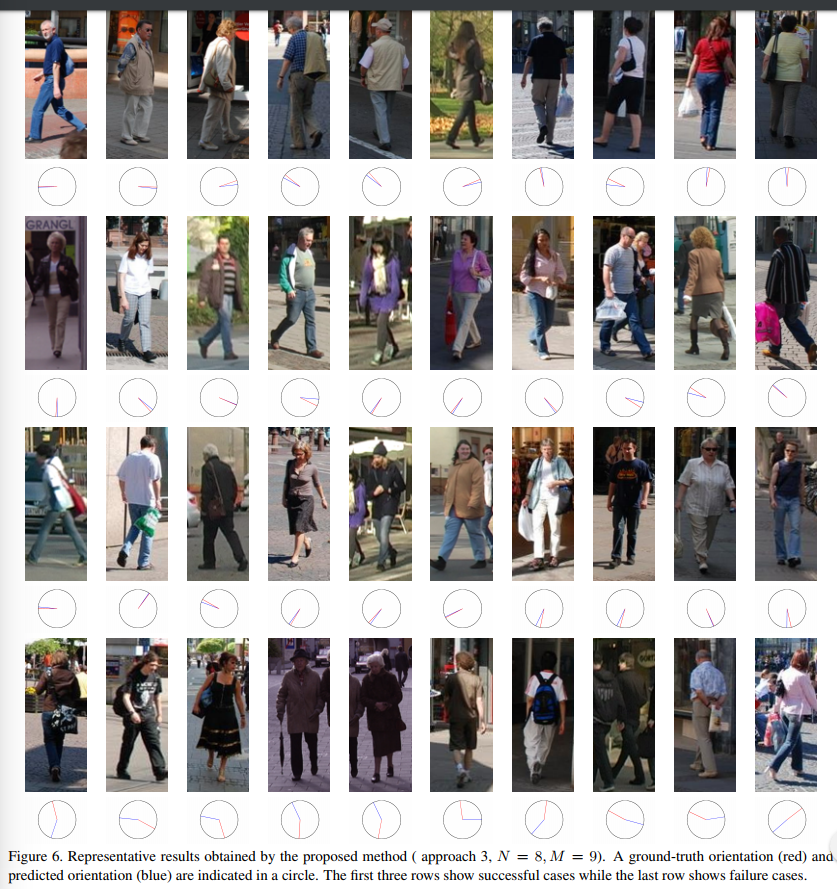
The third method uses a finite number of discreet \(N=4\) orientations. In order to reduce the discretization error, they train 3 different networks with different starting orientation angle as shown in fig.2. The softmax prediction of the 3 models are then combined with a mean-shift method and the orientation with the maximum probability is retained.
Results
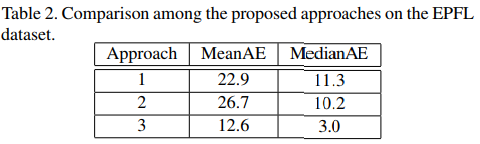
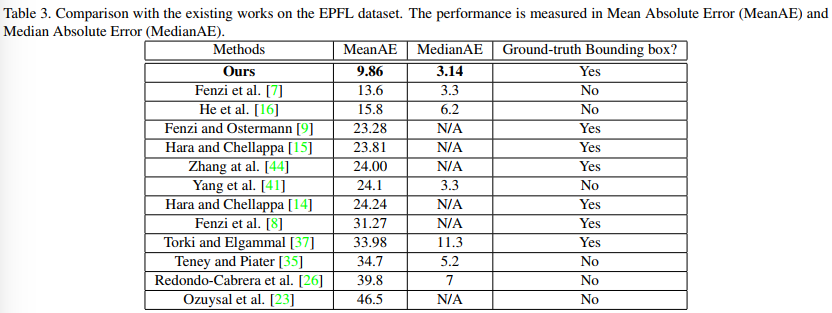
They tested their method on 2 datasets : EPFL-Car and TUD-Pedestrian. In both cases, Method 3 beats Method 1 and 2 as well as previous works.
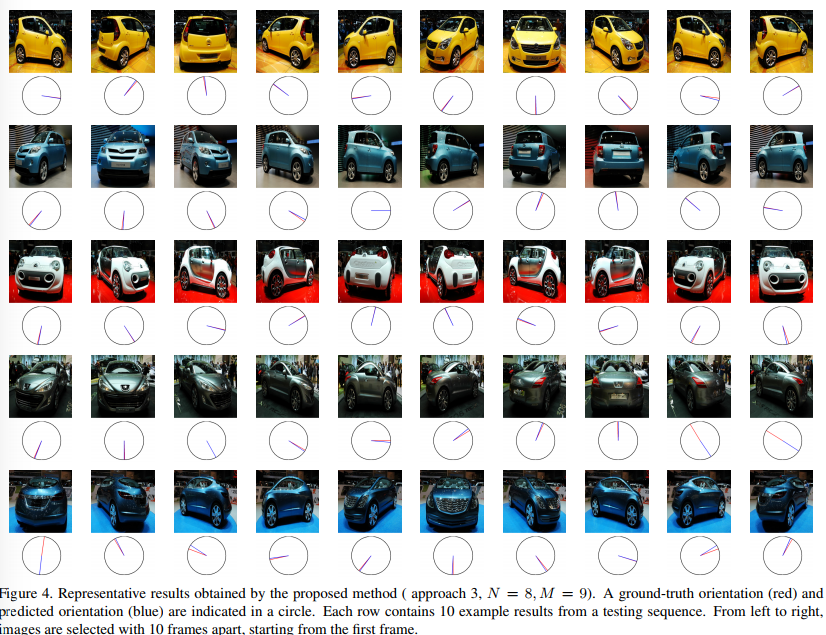
Example of results
Code
Code is available here