SB-Net: Sparse Block Network for Fast Inference
Description
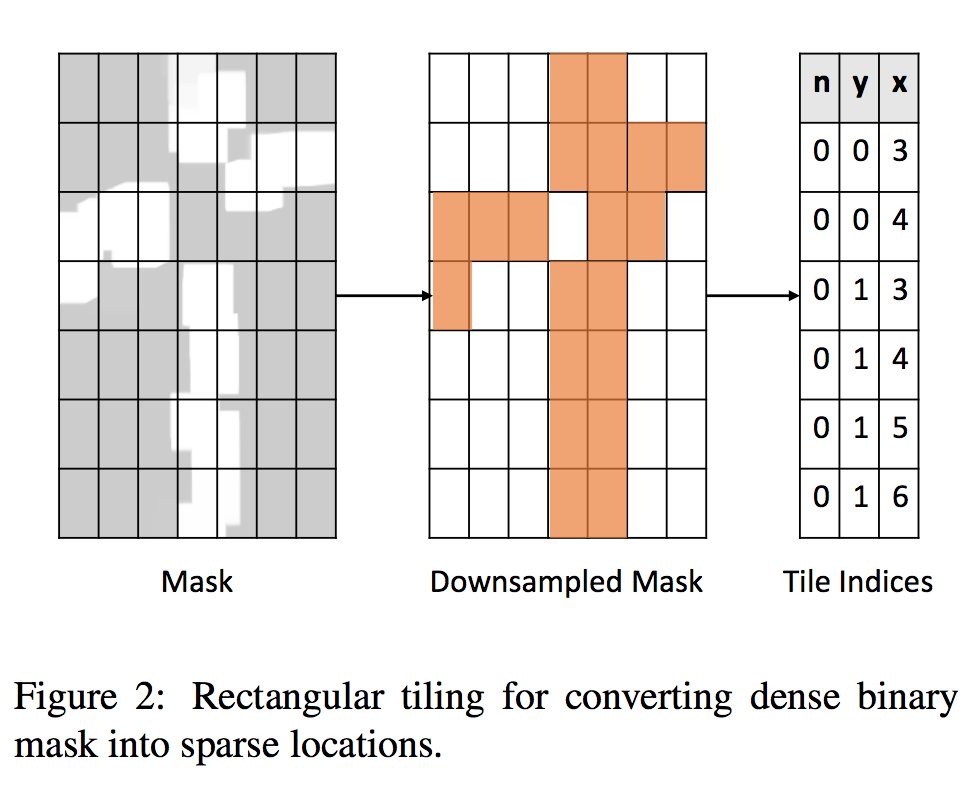
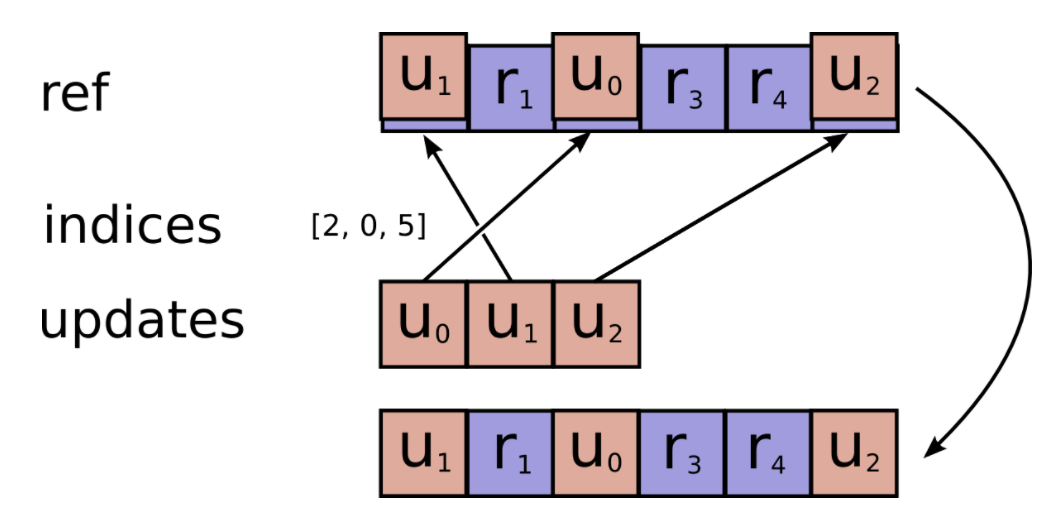
The authors proposed a novel non-sparse convolution algorithm. They use a mask that is known and can apply to input images. For example, in a autonomous driving, only the areas on the roads are interested and be accessible from the offline road map mode. This mask is a binary {0-1} to represent active/inactive regionsof images for CNN, and all CNN operations, will be placed on the active part of images. The binary mask has been converted to a list of indices, where each index belongs to the location of the corresponding pixel (Fig:2 ).
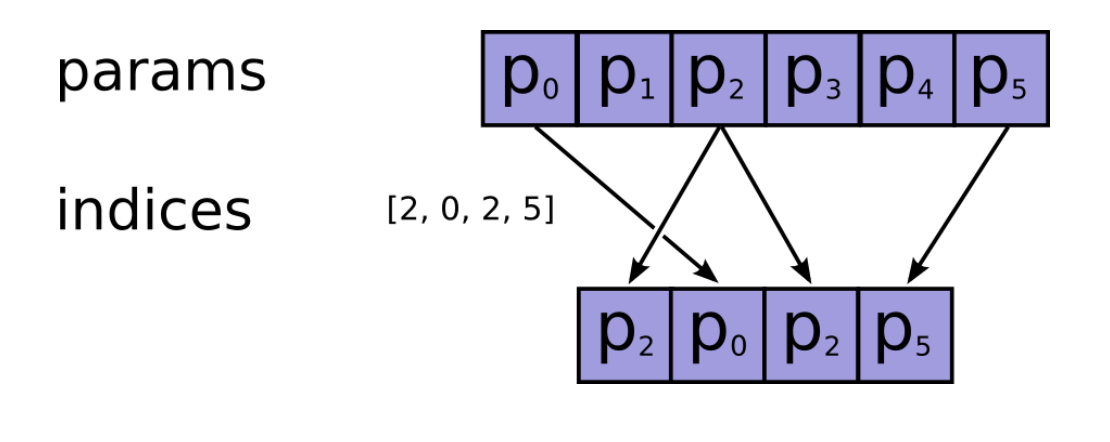
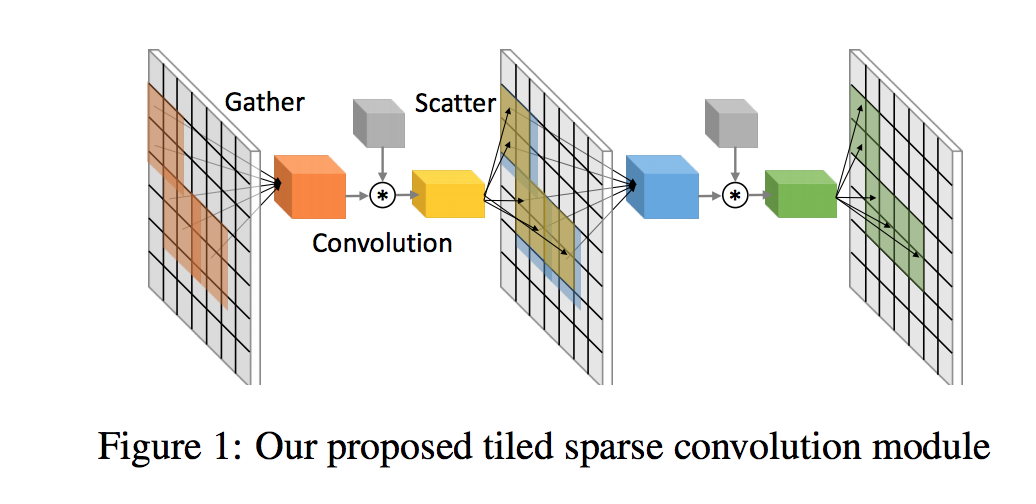
The authors used two operations before and after a convolution in each layer to be transferred between dense and sparse modes called gather and scatter(fig:1).
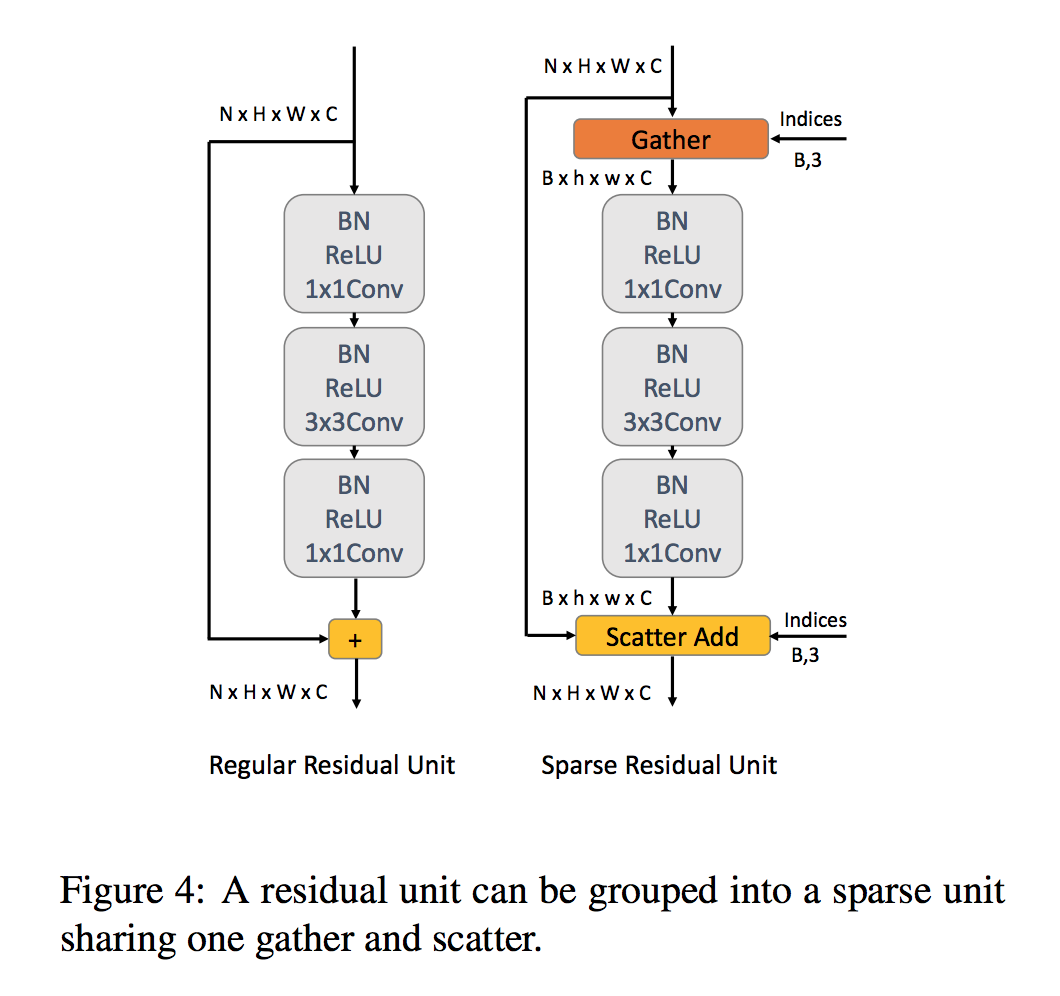
In gather mode, given a list [B,3] where B, is the number of index in list, and “3” is ( chanel number, x-position,y-position), the input size ( N * H * W * C) is changed to (B * H* w * C), and this operation get inverse in scatter kernel(fig:4).
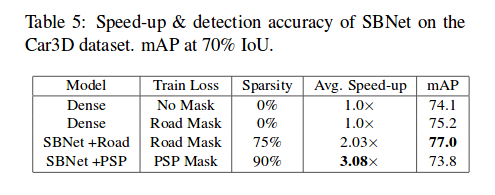
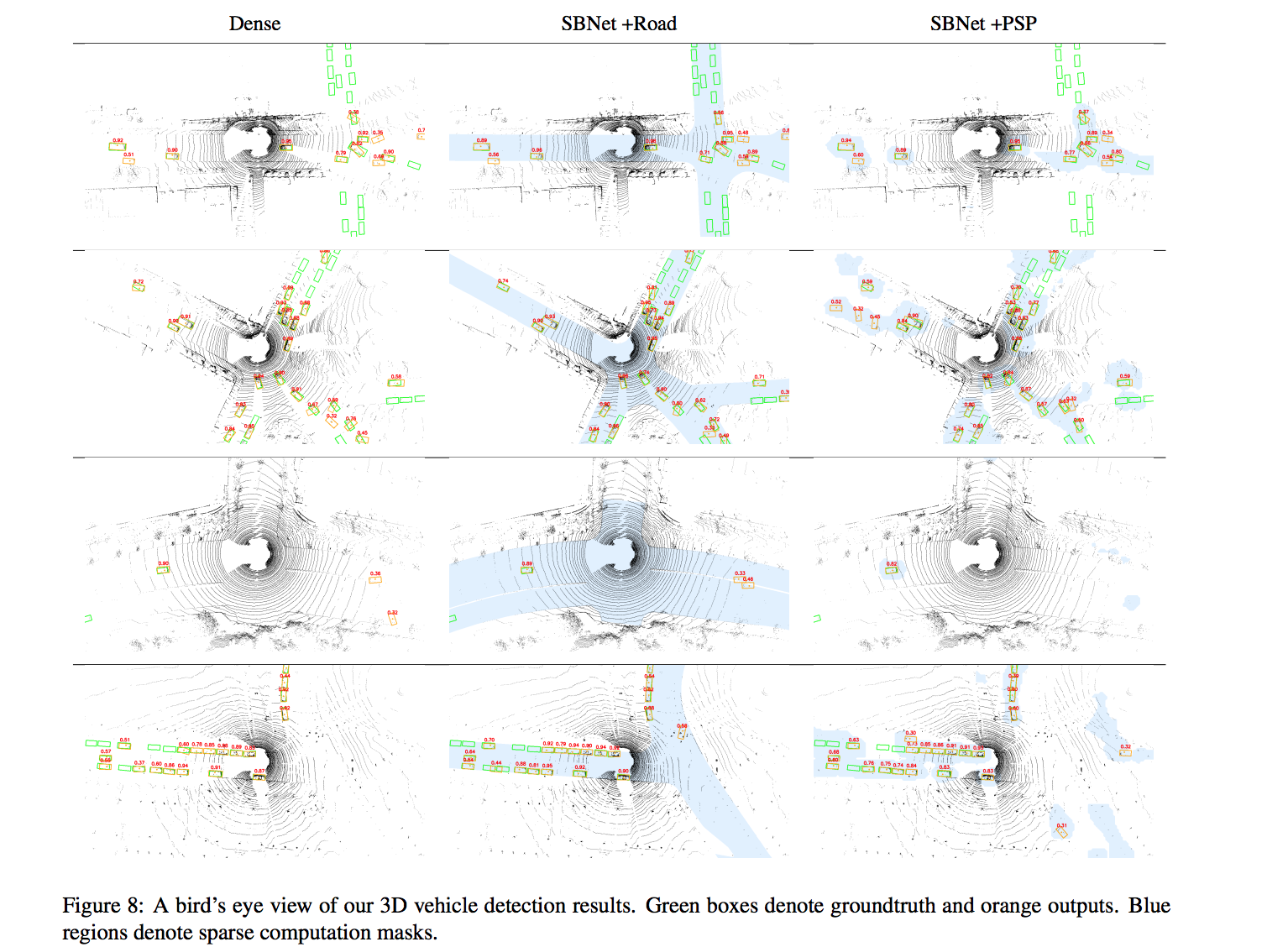
Results