Boundary-aware Instance Segmentation
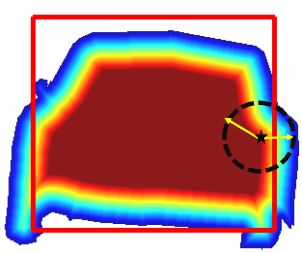
In this paper, the authors propose a boundary-aware method which is resilient to error from the region proposal network (RPN). Most methods use a RPN to extract boxes and then estimate a binary mask to perform instance segmentation. Those methods suffer from the inaccuracy of the RPN. To resolve this problem, the authors propose a new representation which is based on the distance between the pixel and the nearest boundary.
Pipeline
First, they predict the boxes using an RPN. After ROI Warping, they predict a mask larger than the box. The mask is using the representation explained before.
Using the mask and the box, they predict the class before computing the loss.
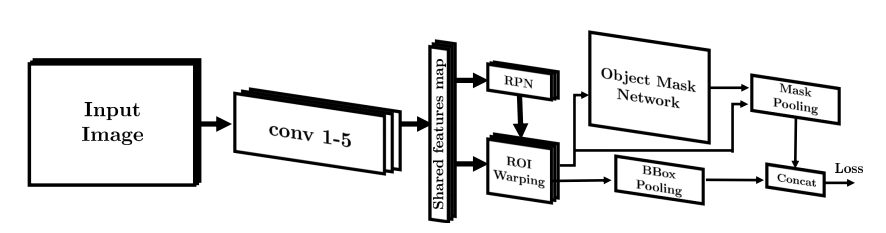
The authors can retrieve the object by doing an inverse-distance transform on the prediction from the Object Mask Network.
Results
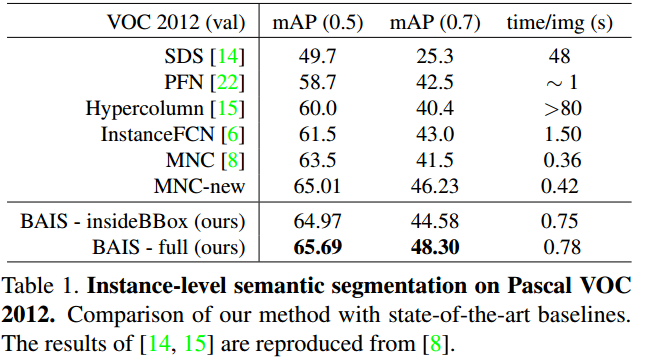
The network is quite big and slow compared to the previous SotA (78ms versus 42 for MNC [^1]). While the idea is interesting, the results are quite the same as MNC on PASCAL VOC 2012.
They did try the model on the Cityscapes dataset, but they did not get good result. (17.4% AP versus 32% for Mask R-CNN)
[^1] J. Dai, K. He, and J. Sun. Instance-aware semantic segmentation via multi-task network cascades. In CVPR, 2016